Differential Barometer OEM ModuleUser Manual
(DBO433, DBO868, DBO915)
September 2020© Advanced Sensor Research Ltd.

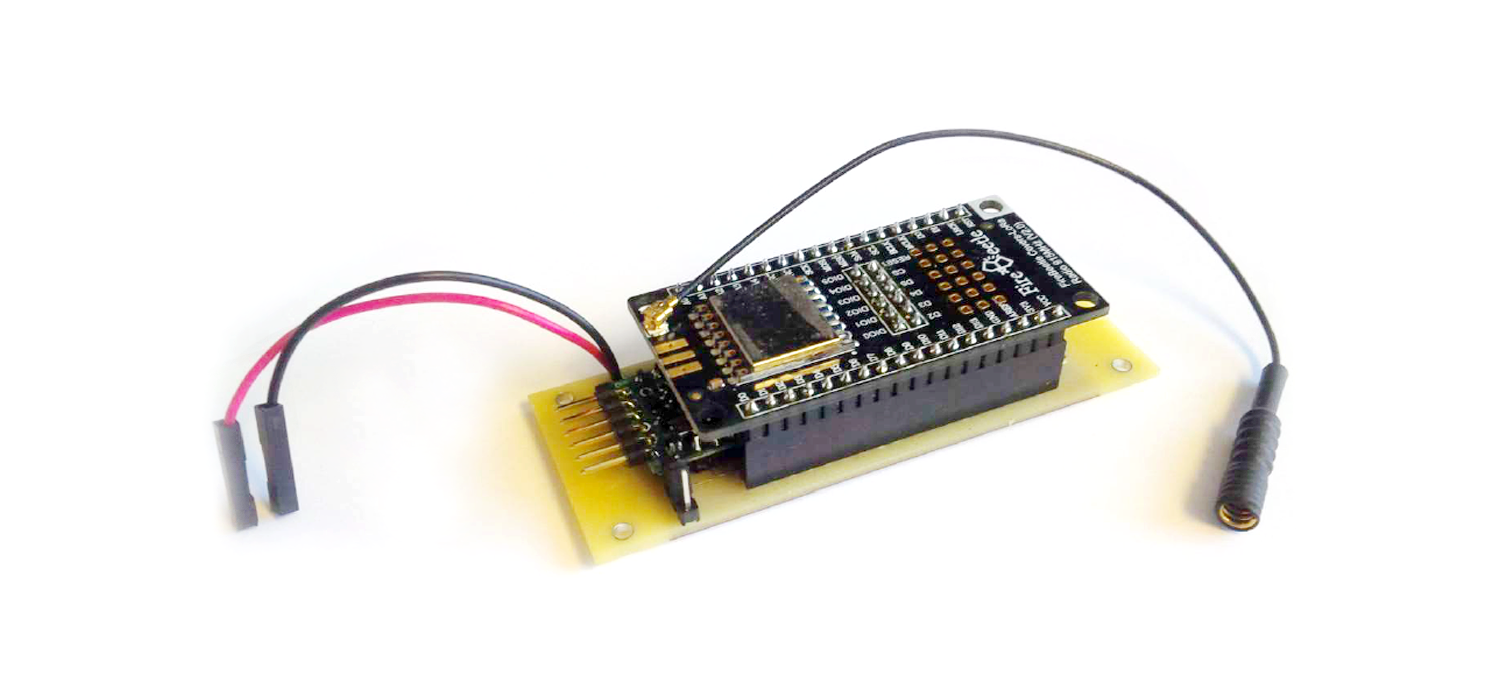
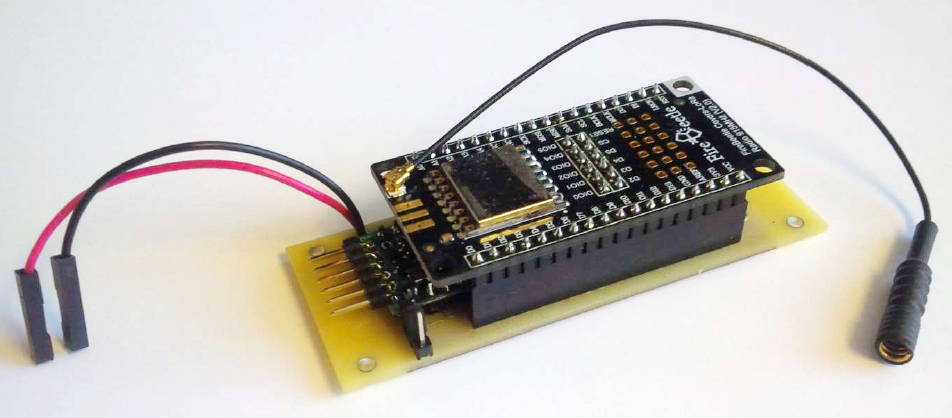
Overview
The DBOxxx series differential barometer OEM module provides atmospheric pressures and derived elevations at a rover using corrections transmitted from a stationary base. In traditional systems elevations are calculated based on pressure readings for a stand-alone unit and are subject to the errors inherent with environmental changes in pressure.
Applications
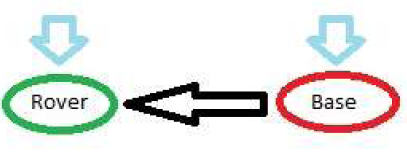
A) Determining a floating rover elevations based on corrections (black arrow) from a fixed base. In this application the rover outputs a corrected elevation as it is raised or lowered relative to the ambient atmospheric pressure (blue arrows). When used inside an enclosed space such as a building both units must be located within.
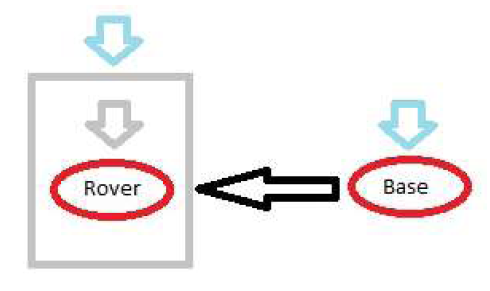
B) Determining a fixed rover pressure difference based on corrections (black arrow) from a fixed base. In this application the rover outputs a corrected pressure (grey arrow) inside an enclosed space such as a building (grey rectangle) relative to the ambient atmospheric pressure (blue arrows). The base must be located outside the enclosed space.
Specifications
- Accuracy: 20cm +/- = 0.024 mbar +/- (differential mode)
- Current (base): 10mA (typ) @ 5VDC
- Current (rover): 20mA (typ) @ 5VDC
- Dimensions (L x W x H): 82mm x 32mm x 18mm
- Range: 1Km (DBO433/DBO915), 5Km (DBO868)
- Voltage: 3.8 – 15 VDC
- Weight: 30g
Pinout

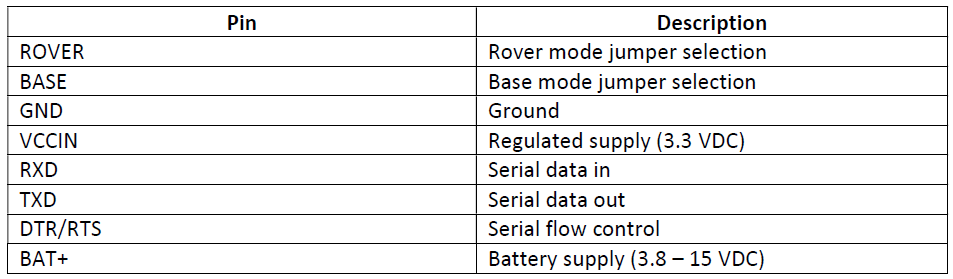
Serial communication parameters are 9600bps (N,8,1). The DTR/RTS signal pin is only required to update the firmware.
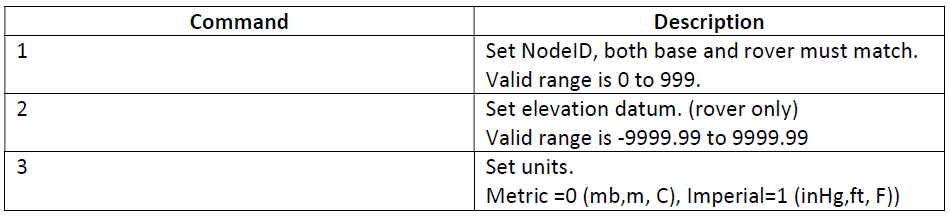
Commands
The general command syntax is command, value followed by CR+LF.
Output
On initialization the unit will send the string ASR DBOxxx v y.y where:xxx model number (433,868 or 915 MHz)y.y firmware revision number
Base output syntax is as follows:NodeID,R,Units,Local Pressure Datum, Local Pressure,Remote Pressure Datum,Remote Pressure,Differential Pressure,Local Elevation Datum,Local Elevation,Remote Elevation Datum,Remote
Elevation,Differential Elevation,Local Temperature,Remote Temperature *Checksum
In addition rover mode will output the following status codes:
NodeID,R,-1*Checksum Elevation Datum not setNodeID,R,-2*Checksum base NodeID does not matchNodeID,R,-3*Checksum base Checksum failed
Checksum is a hex value calculated by applying XOR on each character in the string up to but not including the asterix (*).
Setup
The following is the initial setup procedure:
- Select BASE jumper position on base.
- Send 1,NodeID to base.
- Select ROVER jumper position on rover.
- Send 1,NodeID to rover.
- Send 2,Elevation Datum to rover.
- Send 3,Units to rover.
NodeID and Units settings are persistent and will be retained when power cycled, the Elevation Datum must be reset each time. Only step 5 above is required for subsequent power-ups.
Demo Software
The Differential Barometer Demo software is available for download on our website at https://www.asr-web.com/support and allows users to evaluate the capabilities of the system.The DBO_demo.exe file is invoked with a single parameter which specifies the serial port number to use. After installation right-click the shortcut and select “Properties”, under the “Shortcut” tab enter the port number after the “Target” path as highlighted below then click the “OK” button.

When connected to the base, pressure and elevation graphs are absolute readings. Only the base temperature is displayed in this mode. The range corresponding to 0 on the graphs is shown in brackets in each title. The left button on the bottom left will be labeled “Base (x)” where x is the current NodeID. To set a new NodeID enter it into the text box and click the button. The units can be changed on the bottom right.
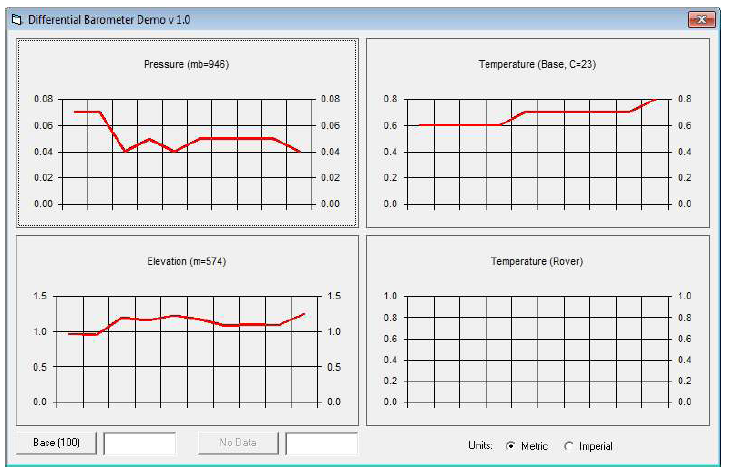
When connected to the rover, pressure and elevation graphs are differential readings. The range corresponding to 0 on the graphs is shown in brackets in each title. The left button on the bottom left will be labeled “Rover (x)” where x is the current NodeID. To set a new NodeID enter it into the text box and click the button. The right button on the bottom left will be labeled “Datum” until the datum is set. To set the datum enter it into the text box and click the button. Once the datum is set the button label will change to “Datum (x)” where x is the current datum and differential data will be displayed. The units can be changed on the bottom right. If both buttons are greyed out there is no communications link with the base for corrections, if only the Datum button is greyed out the NodeID of the rover does not match the base.

A log.txt file in the application directory shows the output with a date/time stamp.

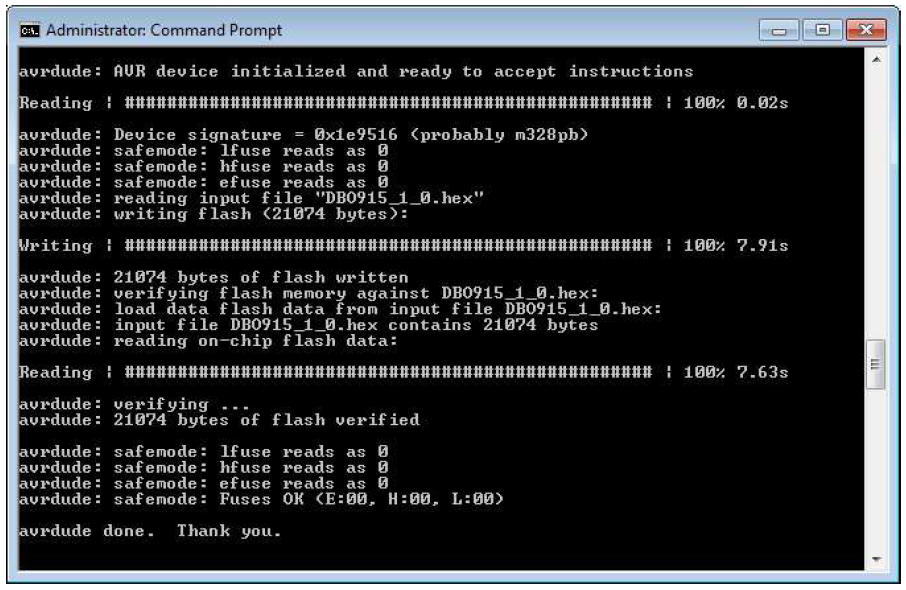
Firmware Updates
Firmware updates are available for download on our website at https://www.asrweb.com/support.The following is the firmware update procedure:
- Connect the OEM board to a USB-serial converter, the DSR/DTR line must be used.
- Connect USB-serial converter to a port on your local machine.
- Unzip the package.
- Launch a command window.
- Change the directory to the location of the package.
- Invoke update.bat with a single parameter which specifies the serial port number to use.
References
[xyz-ips snippet=”download-snippet”]