
 TF03-100 LiDAR(Long-Distance Sensor)Product specification V1.0
TF03-100 LiDAR(Long-Distance Sensor)Product specification V1.0

TF03-100 is an industrial high-speed LiDAR with a range of up to 100m. TF03-100 includes compensation algorithms for outdoor glare and other interference, so it works normally under strong light environment and rain, fog, and snow conditions. Different built-in operating modes let customers change parameters and configurations to meet their needs.
Technical specifications
Two versions of TF03-100 are available to customers who have different interface and power supply requirements:
- Standard version supports TTL serial port and CAN interface with 5V power supply (If the 6-24V power supply is needed, please contact sales)
- RS485/RS232 version supports RS485/RS232 interface with 6-24V power supply.
| Parameters name | Standard version | RS485/RS232 version | |
| Product performance | Operating range | % reflectivity % reflectivity% reflectivity&100Klux % reflectivity&100Klux | |
| Accuracy① | ±10cm (within 10m), 1% (10m and further) | ||
| Distance resolution | 1cm | ||
| Frame rate② | 1Hz~1000Hz adjustable (default 100Hz) | ||
| Repeatability | 1σ:<3cm | ||
| Ambient light immunity | 100Klux | ||
| Operation temperature | -25~60℃ | ||
| Enclosure rating | IP67 | ||
| Optical parameters | Light source | LD | |
| Central wavelength | 905nm | ||
| Photobiological safety | CLASS1(EN60825) | ||
| FOV③ | 0.5° | ||
| Electrical parameters | Supply voltage | 5V±0.5V | 6V-24V |
| Average current Peak current | ≤180mA | ≤200mA @ 6V;≤100mA @ 12V;≤50mA @ 24V | |
| Power consumption | ≤0.9W | ≤1.2W | |
| Communication interface level | LVTTL(3.3V) | RS485/RS232 | |
| Communication interface | UART/CAN/IO | RS485/RS232 |
| Parameters name | Standard version | RS485/RS232 version |
|
Others |
Dimension | 44mm*43mm*32mm(L*W*H) |
| Enclosure material | Aluminum alloy | |
| Storage temperature | -40~85℃ | |
| Weight | 77g±3g | 80g±3g |
| Cable length | 70cm |
Notes:① Accuracy and repeatability are measured in whiteboard (90% reflectivity) and will be somewhat different in the case of different reflectivity or light sensitivity conditions.② The highest frame rate can be customized for 10KHz.③ FOV of the light spot, horizontal is different with vertical, the detection angle in the parameters table means the maximum one, which means the horizontal one.Note: Lidar’s horizontal axis and light spot’s axis are the same when the logo faces up.
Product dimensions
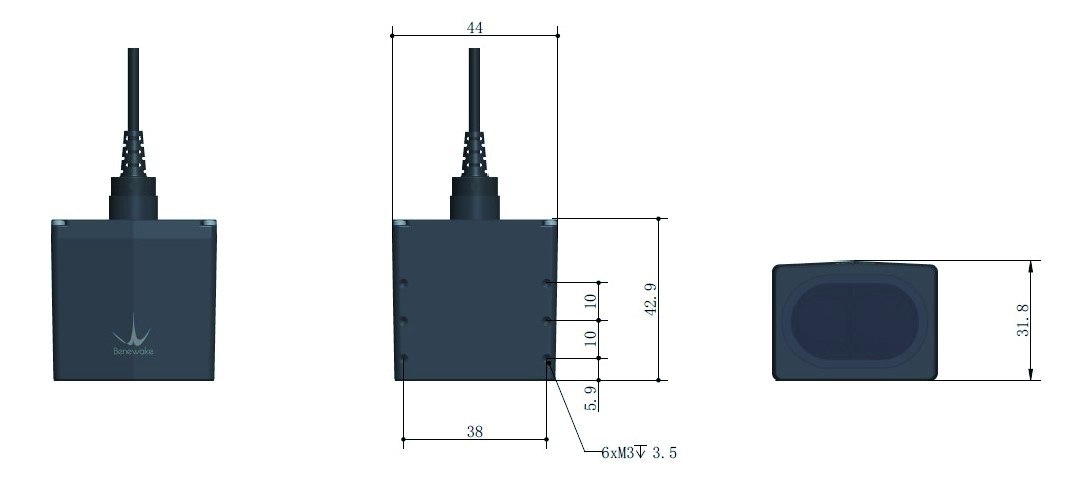 TF03-100 dimensions (Left 1: top view; Left 2: upward view; Left 3: front view)
TF03-100 dimensions (Left 1: top view; Left 2: upward view; Left 3: front view)
Communication interface
TF03-100 standard version supports TTL serial port as default, and CAN communication mode is also available to use if needed. The command is provided for modifying to CAN mode, but only one of the two modes are working, two of them cannot output at the same time.TF03-100 RS485/RS232 version supports RS485 and RS232 communication modes at the same time. By default, both interfaces can communicate, and different interface lines can be used.
TF03-100 serial port communication protocol
| Communication Protocol | UART/RS485/RS232 |
| Baud rate | 115200 |
| Data bit | 8 |
| Stop bit | 1 |
| Checksum bit | N/A |
| Communication Protocol | CAN |
| Baud rate | 1000K |
| Receiving ID | 0x3003 |
| Sending ID | 0x3 |
| Frame format | Default sending frame is a standard frame, receiving frame support standard frame and extended frame |
Configurable parameters
| Configurable item | Description | Factory configuration |
| Custom frame rate | Detection frame rate could be configured by related command, range 1~1000Hz | 100Hz |
| Over range output | This value will be pushed output when measuring value more than this value | 100m |
| Output format | Serial port/Pixhawk/IO/CAN | Serial port |
| Custom baud rate | a) Serial port baud rate could be customizedb) CAN port baud rate could be customized, CAN ID could be changed | / |
| Factory reset | TF03-100 can be restored to the factory settings via tf03_setup GUI software. | / |
| Configuration saved when power cut | Parameters could be saved when power cut by related command | / |
Product Certification

Benewake(Beijing) Co., Ltd.ADD.:No.28 Xinxi Road, Haidian District, Beijing, ChinaTel :+86-010-57456983Email:[email protected](The company)[email protected](Technical support )en.benewake.com
References
[xyz-ips snippet=”download-snippet”]