GEPRC 1877038 CineLog 30 Analog 126mm 3 Inch 4S FPV Racing Drone
Overview:
The latest 3-inch Quadcopter developed by GEPRC is officially released now, and two versions are currently available: CineLog30 VISTA Polar and CineLog30 Analog.CineLog30 is developed on the basis of CingLog25. It has a stronger power output with 1404-3850kv motor and T3 x 3 x 3 propellers.Ultra light fuselage weight, and CineLog VISTA Nebula Nano equipped with Naked GoPro Hero 8 Camera and 4S660mAh battery take-off weight is only 249g.The duration of the flight is 7 minutes.The INSTA 360 GO2 camera also can be installed by the mounting base.We pursue lighter weight, better flying feel and more extended functions of the Quadcopter.
Specification:
- Model: Cinelog30 Quadcopter
- FC: GEP-F411-35A AIO
- ESC: BLheli_S 35A
- VTX: VISTA
- Camera: Caddx Polar
- Antenna: CADDX Polar Antenna
- Motor: GR1404 3850KV
- Propeller: T3x3x3
- Frame: GEP-CL30
- Motor to Motor: 126mm
- Cinelog30 HD Weight: 158.5g
- Receiver: PNP,Frsky RXSR ,TBS Nano RX
Features:
- Small size, light weight, with 4s660mah battery, take-off weight is only 222.5g.
- Equipped with HD VISTA digital FPV system.
- The GoPro Hero 8 naked camera and INSTA 360 GO2 camera can be installed, with the mounting base.
- Great video shooting effect.
- 1404-3850KV motor with T3x3x3 propellers, strong power output.
Warranty Policy:
1. If Quadcopter is damaged or unknow issue,please contact GEPRC and send it back . We’ll do our best to get this taken care of quickly for you.2. Any impact damage, product liquid damage, high temperature burn or other artificial damage is not covered by warranty.
PS:
1. All components has been strictly inspected and tested before shipping.2. If you have any problems, please cooperate with our engineers to figure out solutions.(E-mail: [email protected].)
DJI Digital FPV System:
- Turn the power of the FPV Goggles, DJI FPV Transmitter,and Quadcopter. Press the FPV Goggles bind button twice, and it will beep to indicate the binding state.

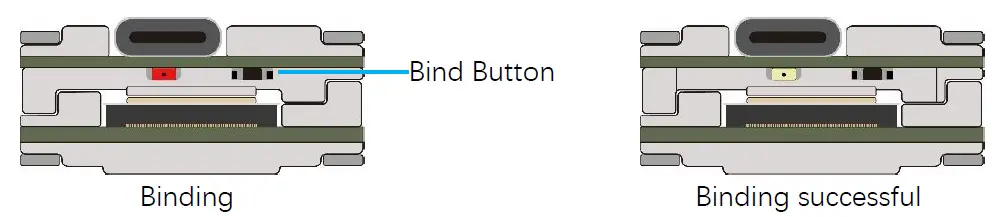
- Press the VISTA bind button,the indicator light turn red ,indicating that it is binding.Then the indicator light turns yellow, means the binding is successful,and the FPV Goggles will display the received picture.
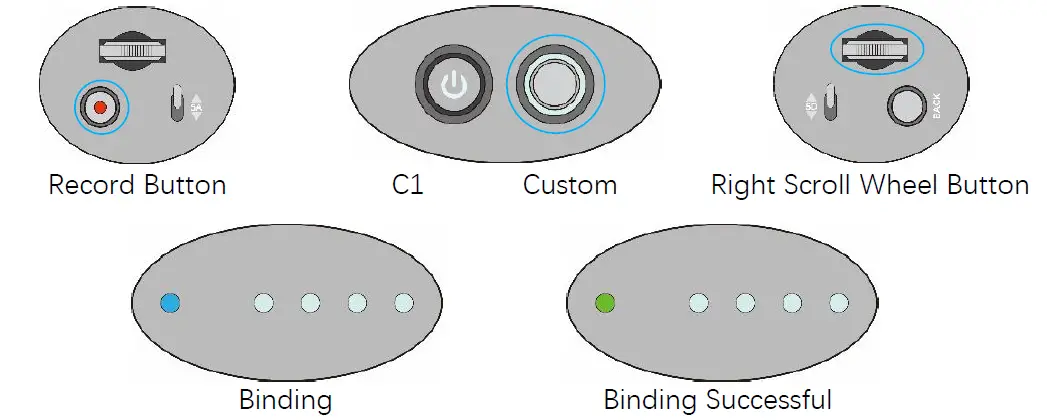
- Press the C1 custom button, record button and right scroll wheel button of the remote controller,at the same time. The indicator light turns blue, and the remote controller sends a beep indicating that it is binding.
- Press the VISTA bind button,the indicator light turn red ,indicating that it is binding.Then the indicator light turns yellow, means the binding is successful.And the remote controller inducator light turns Green.

Bind TBS NanoRX:
- For Taranis X9D/X9D Plus/X9E and Taranis QX7, turn on the transmitter, go to the TOOLS – CROSSFIRE SETUP – XF Micro TX ,and select Bind.
- Turn on the receiver while holding the bind button on the receiver, release the button and the green LED on flash .and then holding the button for 8 second ,and release. And the green light is off and the red light is flashing, ‘update micro RX?’ will appear on the transmitter screen, and select ‘ENTER’.
- Wait for the update to complete, the binding is successful, and the receiver green light is on.
Bind FrSky R-XSR:
1. For Taranis X9D/X9D Plus/X9E and Taranis QX7, turn on the transmitter, go to the MENU –MODEL SETUP – PAGE 2, choose Internal RF, and select BIND.2. Turn on the receiver while holding the bind button on the receiver, release the button and the bule,red,yellow LED on .3. When the red light flashes, it indicates that the binding is successful.Turn off the receiver,and then turn on the receiver.The blue light and yellow light of receiver are on, indicating that the link is normal.

Install Betaflight:
Although your Quadcopter comes from the factory nearly completely ready to fly, you still need to install betaflight to facilitate your subsequent use of betaflight for debugging. Installation package download address:https://github.com/betaflight/betaflight-configurator/releasesEnter the web page, pull to the bottom, and select the appropriate installation package to download. EXE suffix is Windows system, DMG suffix is MacOS system, RPM / DEB suffix is Linux system, APK suffix is Android system.
Install Drivers:
If you are on windows, you must install the driver manually. MacOS and Linux do not.
CP210x Drivers: https://www.silabs.com/products/development-tools/software/usb-to-uart-bridge-vcp-drivers
STM USB VCP Drivers: http://www.st.com/en/development-tools/stsw-stm32102.html
Zadig: http://zadig.akeo.ie/
ARM(DJI Transmitter):
With DJI FPV Transmitter, the toggle switch is set at the factory. The corresponding functions of each switch are as follows:SA AUX1(ARM)SB AUX2(MODES)SC AUX3(BEEPER)SD AUX4(Vacancy)
![]()
DJI toggle switches are all three sections. If you move the Yellow cursor of the corresponding aux channel of the switch, the corresponding function will be turned on when you move to the set range.
![]()
OpenTX Transmitter:
The transmitter of openTX system needs to check the AUX channel. For Taranis X9D/X9D Plus/X9E and Taranis Q X7, turn on the transmitter, go to the MENU –MIXS and view the current AUX channel settings.
![]()
CH1-CH4 corresponds to four channels of rockerCH5(SF)AUX1(ARM)CH6(SG)AUX2(MODES)CH7(SA)AUX3(BEEPER)CH8(Vacancy)AUX4(Vacancy)FrSky X9D transmitter SF toggle switch are two sections. If you move the Yellow cursor of the corresponding aux channel of the switch, the corresponding function will be turned on when you move to the set range.
![]()
Use the transmitter wheel to move the cursor to select the AUX channel, and then press and hold the wheel key to edit the channel.
![]()
You can name the aux channel, or set the toggle switches you want, and exit and save it. ![]()
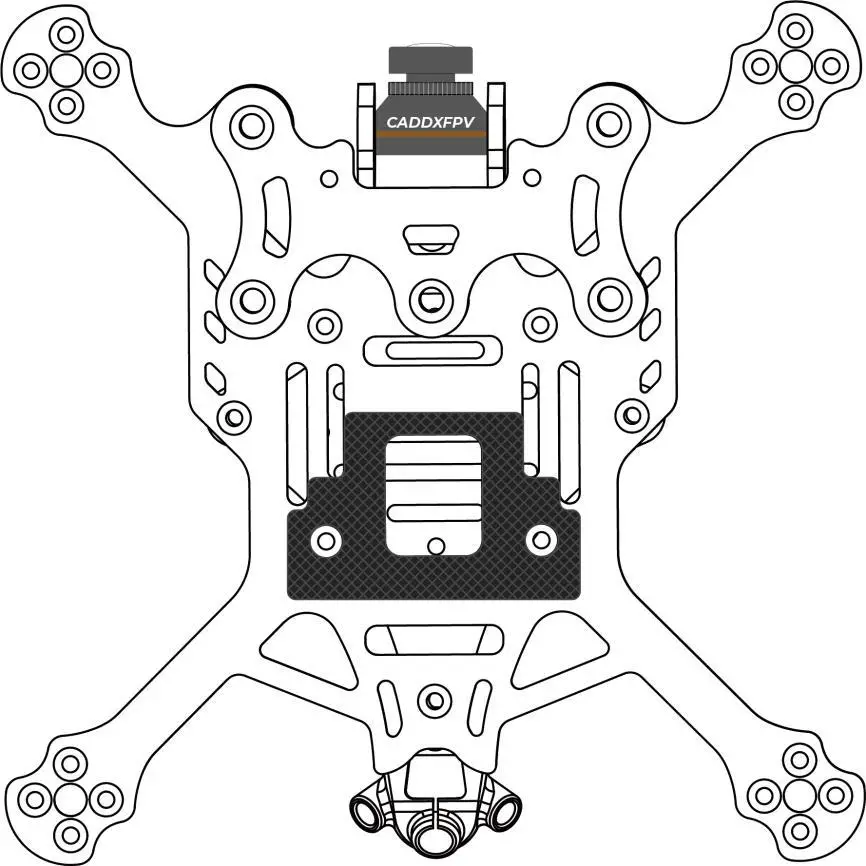
Install Silicone Pad,Landing pad:
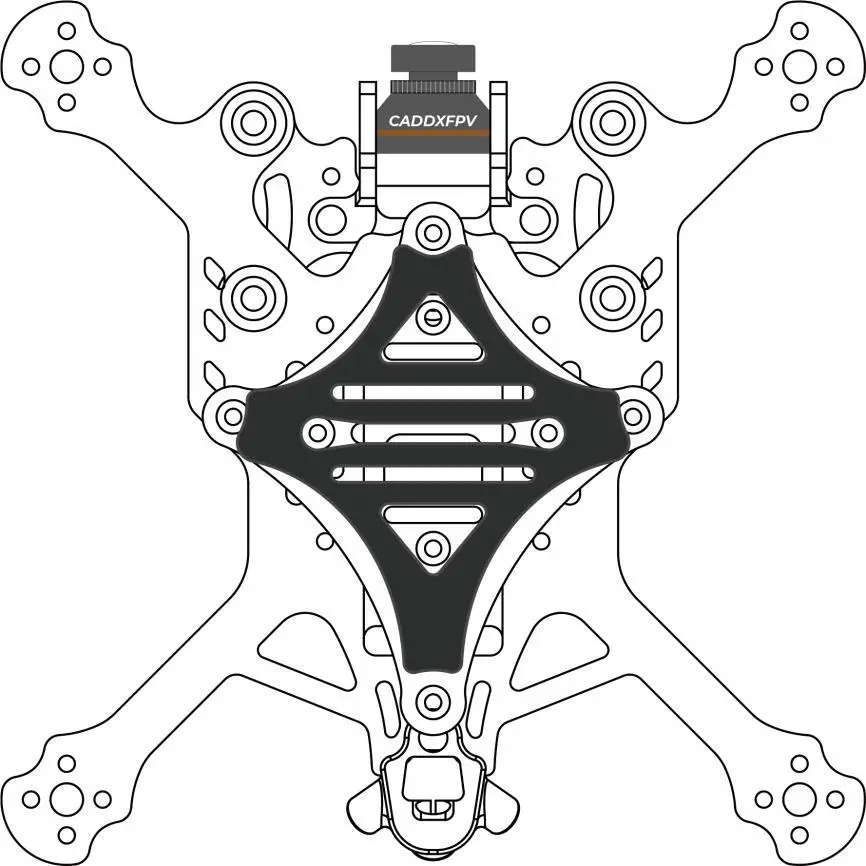
Install Propellers:
Although the propeller of cinelog30 are installed in the factory, the direction of the propeller should be checked before taking off.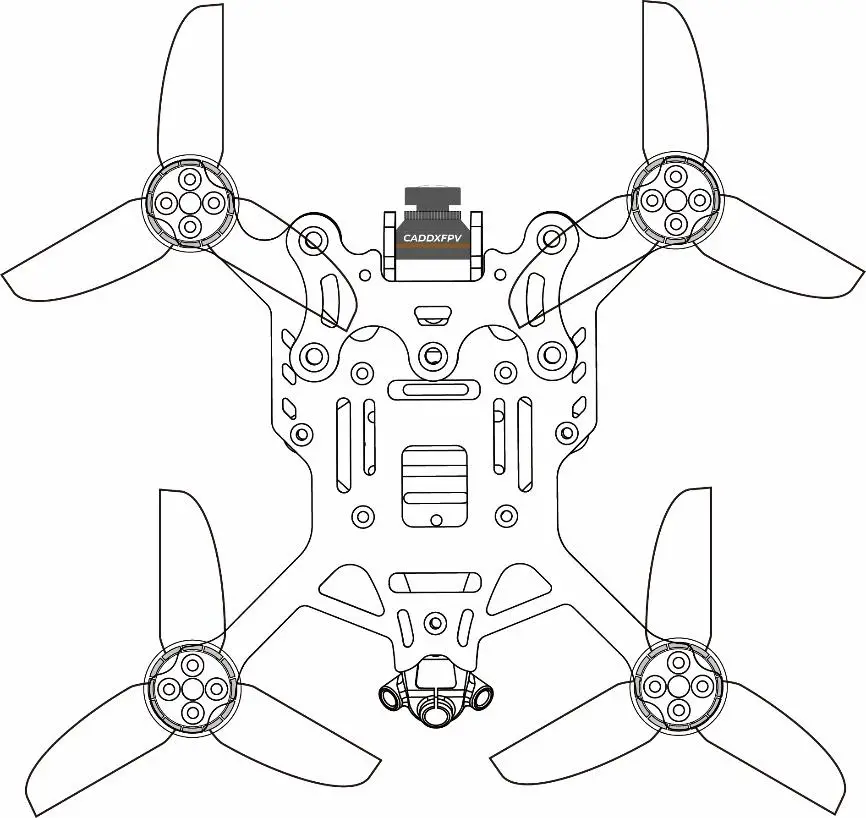
Pre-flight Check:
In many cases, the cause of a Quadcopter crash is not checked before takeoff. For the sake of safety, we suggest that you check before every flight. The steps are as follows:
- Turn on the transmitter and select the correct mode. Please confirm that the arming switch on the transmitter is in the “disarmed” position and the throttle is all the way down;
- Please perform a physical inspection of the Quadcopter for damage. If there is damage, please repair it first;
- Please confirm the propeller is in the right direction and the propeller nut is locked, otherwise there is a risk of a crash;
- Check LiPo battery voltage. A fully-charged LiPo should be about 4.2 volts per cell, or about 12.6 volts for a 3S, or 16.8 volts for a 4S;
- Please confirm the battery is securely attached to the aircraft by the strap. And secure the balance lead so that it can’t be struck by the props;
- Please Scan the flight area for any safety issues that might be present, such as people or animals;
- Verify that you have clean, strong video in your FPV goggles or screen. If you see interference or you see another pilot’s feed, resolve this issue before flying;
- Arm the quadcopter. Listen for the props hitting anything like an antenna or the battery wire;
- At this stage, take off and enjoy flying.Note: if you choose to fly close to water, please pay attention to flight safety. It is difficult to salvage the Quadcopter when it falls into the water, and the water in the Quadcopter is not covered by the warranty.
Include:
- 1 x CineLog30 HD VISTA Polar Quadcopter
- 1 x Battery strap 20x200mm
- 2 x T3x3x3 propellers (pairs)
- 2 x Propeller guards
- 2 x EVA damping rings of guards
- 2 x EVA landing pads
- 2 x Battery Silicone Pads
- 1 x Antenna fixed tube
- 1 x Screw package
- 1 x TBS receiver mount(PNP)
- 1 x TBS receiver antenna mount (PNP)
Contact:
Website: https://geprc.com/
report this ad
References
[xyz-ips snippet=”download-snippet”]