![]()
HGLRC Dual Gyro Flight Controller User Manual

Package Included
- HGLRC FD765 STACK*1
- Accessory Package*1
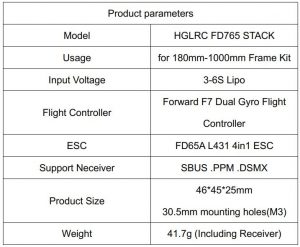
1. Product Specifications
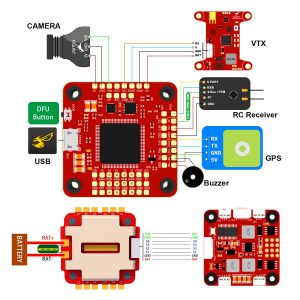
2. Interface Description
3. Check the flight control drive
1. Long Press BOOT buttons.connect USB.The system automatically install the driver

2. Driver cannot be installed, please download Impulse RC_Driver_Fixer

3. Double-click on the run(Plug in the flight controller to automatically install the driver)

3. Double-click on the run(Plug in the flight controller to automatically install the driver)

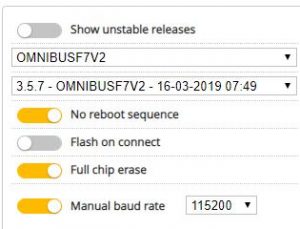
4. open betaflight configurator ![]() ,enter DFU mode (It is recommended to use the latest Betaflight version)
,enter DFU mode (It is recommended to use the latest Betaflight version)

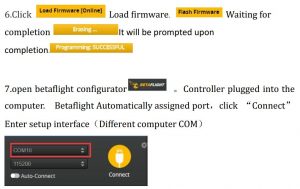
5. Click ![]() Select firmware version(Dual 8K is recommended. (Betaflight 4.0 firmware does not support 32K))
Select firmware version(Dual 8K is recommended. (Betaflight 4.0 firmware does not support 32K))
4. Calibration accelerometer
1. Put the aircraft horizontal and click“Reset Z axis” Click again ![]()

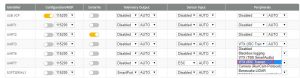
5. URAT serial port use
URAT1 uses receiver telemetryURAT2 uses the receiverURAT3 uses VTX image transmissionURAT6 uses GPSURAT7 uses ESC telemetry
6. Select aircraft model
- Click
 Select model
Select model
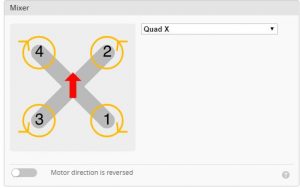
2. Click ![]() Click “I understand the risks”Push Master to check motor steering “Master” Steering can be changed at BLHeliSuite
Click “I understand the risks”Push Master to check motor steering “Master” Steering can be changed at BLHeliSuite

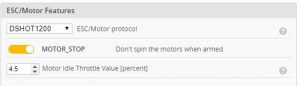
7. Choose ESC/Motor protocol
1.Choose the correct ESC / Motor protocol, Protocol DSHOT1200 is recommended for Wind5 Hybrid racing drone
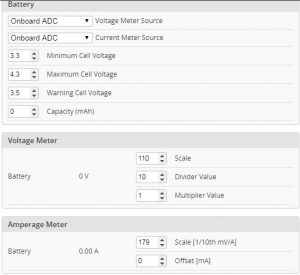
8. Voltage and current parameters setting
1. Click ![]() Setting parameters
Setting parameters
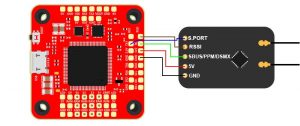
9. Setting up the receiver
- Receiver connection diagram
2. Click ![]() .have found“UART2”Open the receiver serial port
.have found“UART2”Open the receiver serial port

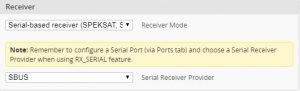
3. Set the SBUS receiver
4. Set the PPM receiver

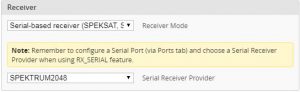
5. Set the DSMX receiver
6. Turn on the receiver telemetry serial port Function on


![]()
10.VTX uses OSD smart audio
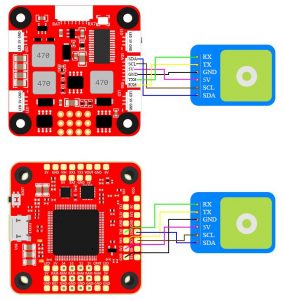
1.VTX connection diagram
2. VTX serial port opens. The protocol is selected according to its own VTX protocol.
3. Use OSD to adjust VTXwhich displays information like battery voltage and mAh consumed while you fly. In addition, the Betaflight OSD can be used to configure the quadcopter, making in-field adjustments and tuning more convenient.

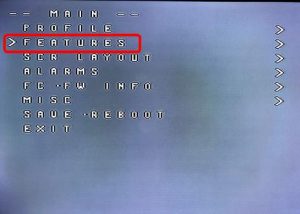
The graphics above show the stick command to bring up the OSD menu. The stick command is: throttle centered, yaw left, pitch forward. The exact stick command therefore depends on which mode your transmitter sticks are in. In the OSD menu, use pitch up/down to move the cursorbetween menu items. When a menu option has a > symbol to the right of it, this indicates that it contains a sub-menu. Roll-right will enter the sub-menu. For example, in the screen to the right, moving the cursor to “Features” and then moving the roll stick to the right will enter the“Features” sub-menu.
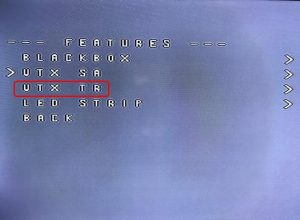
If you are using a video transmitter that supports remote configuration, enter the “Features” menu to configure the vTX. From there, enter either “VTX SA” if you are using SmartAudio (TBS Unify) or “VTX TR” if you are using IRC Tramp Telemetry.
To adjust PIDs, rates, and other tuning-related parameters, enter the “Profile” sub-menu. In the “Scr Layout” sub-menu, you can move the OSD elements (like battery voltage, mAh, and so forth) around on the screen.
The “Alarms” sub-menu lets you control when the OSD will try to alert you that battery voltage is too low or mAh consumed is too high.
When a parameter can be modified, the parameter’s current value will be shown on the right-hand side of the screen. In this case, roll left/right will adjust the parameter up and down.

The screen to the right shows the current vTX settings. From here, you can change the frequency band, channel, and power level of the video transmitter. After making the changes, move the cursor to “Set” and press roll-right to confirm the settings.
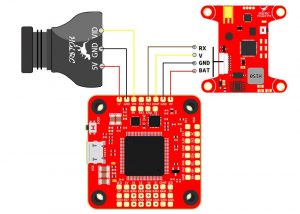
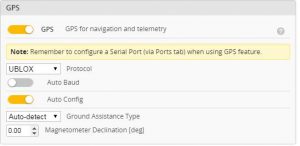
11.GPS parameters setting
1. GPS connection diagram
2. Open the GPS serial port

3. When using the GPS function, remember to configure the serial port (via the Ports tab).
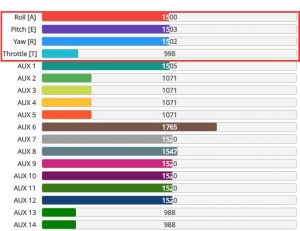
12. Check receiver signal
- Click Check the remote control output signal
13. Select flight mode startup mode
1. Click ![]() set up the function of remote control switch across the channel (below are for reference only)
set up the function of remote control switch across the channel (below are for reference only)

14. OSD settings
1. Click ![]() the OSD Settings, according to the need to choose, drag the OSD schematic diagram of the parameters can be adjusted.
the OSD Settings, according to the need to choose, drag the OSD schematic diagram of the parameters can be adjusted.

15. LED settings
1. Click ![]() Turn on LED support
Turn on LED support
![]()
2. Click ![]() Click
Click ![]() set according to need
set according to need

16. Switching gyro
1. After connecting to the Betaflight ground station, open the ![]() page and enter “get gyro_to_use” and press Enter to view the currently used gyroscope.First is MPU6000.SECOND is ICM20608( Set the MPU6000input:gyro_to_use = FIRST )( Set the ICM20608 input:set gyro_to_use =SECOND )
page and enter “get gyro_to_use” and press Enter to view the currently used gyroscope.First is MPU6000.SECOND is ICM20608( Set the MPU6000input:gyro_to_use = FIRST )( Set the ICM20608 input:set gyro_to_use =SECOND )
17. Troubleshooting
Warning:Please read the cautions as follows, otherwise stability of your flight controller cannot be ensured, your flight controller will even get damaged.
- Keep focus on the polarity. Check carefully before power supply.
- Cut off the power when you connect, plug and pull anything.
- The refresh rate of PID and Gyroscope is up to 32K/16K.
after sales question:
- After receiving the goods, it is found that the product can not be used normally. If the return to the factory is a quality problem, the repair service will be provided free of charge.
- If the product is damaged due to improper operation, the repair service may be provided under the condition that the inspection can be repaired.
- For domestic customers, please contact the after-sales service personnel. For overseas customers, please contact the official website for after-sales service.
Product daily problems
- OSD garbled:If you find garbled characters, please open Betaflight, click “OSD” .and click “Font Manager” clicks on “Upload Font” to update
- When plugged in the battery, the aircraft does not pass the self-test without “BBB” sound. There is only one sound. Please check if the ESC agreement is correct.
- The spin of the aircraft keeps spinning1. Please check if the propeller is correct2. Please check if the motor direction is correct
References
[xyz-ips snippet=”download-snippet”]