
FIFISH V6/V6s
Quick Start GuideV 1.4
Thank you for choosing FIFISH as your underwater exploring kit. This Quick Start Guide will help you learn and operate FIFISH V6 and V6s, the 1 st compact size OMNI- directional ROV.
Safety and Regulations
Operating FIFISH products requests training and practice. Please read through this document before operating in water.
|
Do NOT touch the running propeller |
|
Beware of the environment while operating the ROV (tide, water level, water traffics, etc.) |
|
Do NOT throw the ROV when deploying into the water |
 |
Avoid overheating of motors, do NOT run the thrusters in air for over 30 seconds |
 |
Do NOT look directly to the LEDs, and do NOT touch the LEDs when they are ON. |
 |
Be part of marine protection and conservation for the local coral and marine life |
|
Avoid the reefs, rocks, seaweeds, fishline or other objects that may cause damage to or entanglement of the ROV or tether |
 |
Maintain after dive, check the Maintenance Guide in page 23 |
Introduction
About FIFISH V6FIFISH V6 is a compact-sized OMNI-directional ROV equipped with 4K UHD camera. The patented Smart Thruster Array™ enables V6 to break the limits of movement and unleash the user’s fully creativity. Moving sideways while tilting in ± 90° is now possible. The professional 4K camera, with a 166° FOV fixed lens for underwater video filming/photo shooting, supports H.265 HEVC video format, as well as RAW in DNG.
ROV (Remotely Operated underwater Vehicle)
| 1. 4K Underwater Camera2. 2000 lumens LED × 23. Thrusters × 64. Vent Holes | 5. Rear Wing1,26. ROV Tether Port7. Mounting Port |
Note:
- Do NOT shake or swing while holding the rear wing
- Make sure to hook the loop of the tether on the stem of the rear wing when connecting(See Preparation and Connection / Hardware Connection/ D in page 8)
About FIFISH V6s
FIFISH V6s is the upgrade version of FIFISH V6. V6s equipped with 156 Wh battery, and the underwater robotic arm in standard pack. V6s will allow the underwater objectsreachable, the perfect tool for a scientific survey, marine biology, underwater archaeology, criminal investigation, aquaculture easier than ever.
ROV
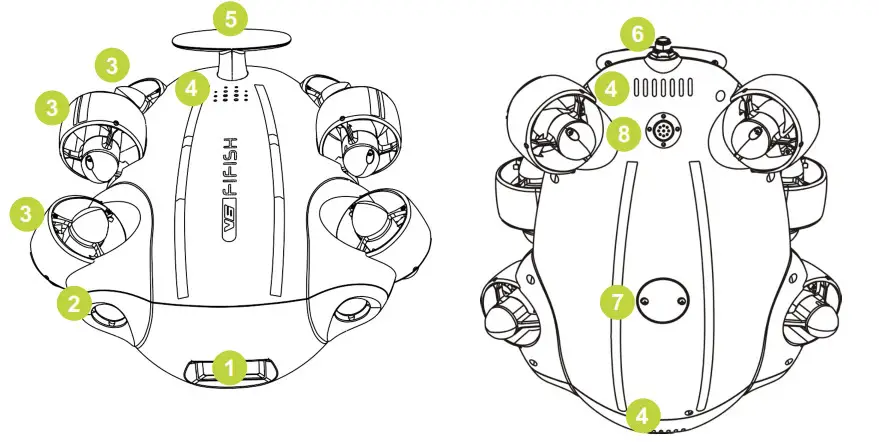
| 1. 4K Underwater Camera2. 2000 lumens LED × 23. Thrusters × 64. Vent Holes | 5. Rear Wing 1, 26. ROV Tether Port7. Mounting Port8. Robotic Arm Port3 |
Note:
- Do NOT shake or swing while holding the rear wing
- Make sure to hook the loop of the tether on the stem of the rear wing when connecting(See Preparation and Connection / Hardware Connection/ D in page 8)
- The robotic arm port shall be clean and dry at all times.
RC (Remote Controller)
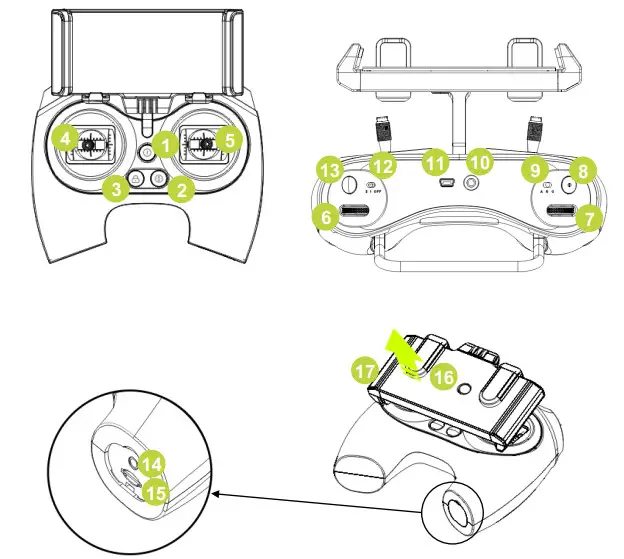
| 1. ON/OFF2. Depth Holding (ON/OFF)3. LOCK/UNLOCK4. Left Control Stick5. Right Control Stick6. Right Wheel7. Left Wheel8. Video Record/Stop9. Control Mode (Attitude / Sport / Combine) | 10. Tether Port11. Ethernet port12. LED Brightness (OFF, 1, 2)13. Photo14. Charging Port15. Micro SD Slot16. Clamp Release Button17. Clamp for Smart Device |
Spool and Tether
| 1. Spool Handle2. Tether Regulator3. Spool Frame | 4. Tether Port5. Foldable Handle6. Tether |
Optional Upgrade Accessories
1. VR Goggle
| 1. Housing2. Smart Phone Bracket | 3. Adjustable Clamp (Suitable for 3.5” to 6.0” smart phones) |
Hold your cell phone when you lock and unlock the clamp.
HDMI Box

| 1. Power Port2. HDMI Output | 3. Ethernet Port |
Preparation & Connection
Install FIFISH APP
APP download & Installations
Option 1. Scan the QR code below to download FIFISH APP.
https://www.qysea.com/support/app-download/
Option 2. Search the FIFISH on App Store (iOS) or GooglePlay (Android).Option 3. Go to the QYSEA website (www.qysea.com) support/APP download
Hardware connection
Overview of Hardware connection

A. Turn ON the remote controller. Press and hold the ON/OFF button, until you hear 7 low to high chimes (Do, Re, Mi, Fa, Sol, La, Ti)
B. The “ON/OFF”, “Depth Holding” and “LOCK/UNLOCK” will rotate clockwise, which indicates “Ready to be connected”
C. Plug the tether (3.5 mm head) into the remote controller
D. Take off the protective cap, tie the knot around the rear wing
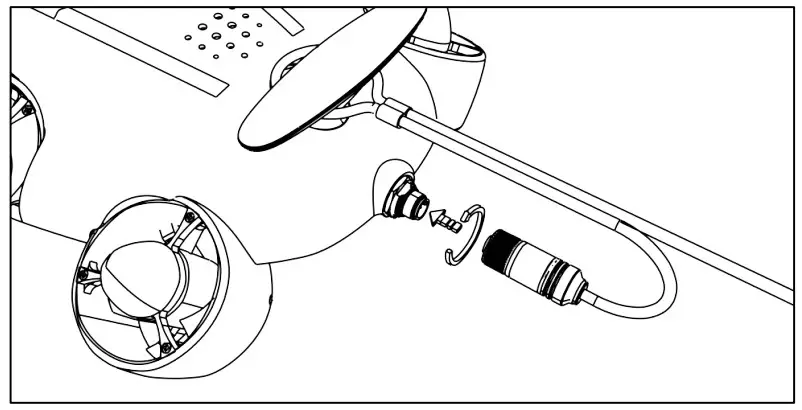
E. Plug the tether (ROV end) into the ROV, the ROV will automatically turn on. The music will play 5 chimes: (Do, Re, Mi, Do, Mi)
 F. Check the remote controller, the “ON/OFF” and “LOCK/UNLOCK” buttons consistently on indicating the successful hardware connection
F. Check the remote controller, the “ON/OFF” and “LOCK/UNLOCK” buttons consistently on indicating the successful hardware connection
Robotic Arm Installation for V6s ONLY
G. Insert the bracket into front vent holes and mounting port
 H. Fasten the 10 screws to secure the robotic arm on the bracket
H. Fasten the 10 screws to secure the robotic arm on the bracket
I. Insert the robotic arm plug into the robotic arm port.
Software connection
A. Connect with the RC’s Wi-FiFind the Wi-Fi network name “FIFISHRC_xxxx”The password is “1234567890”
B. Activate LIVE-Streaming
C. Deploy the ROVPull ONLY on the tether and deploy the ROV into the water. Unlock the thrusters and start diving.The depth shall be greater than 1 meter (about 3 feet) for a better experience.
Retrieve
Lock the thrusters and stop recording the video before closing the FIFISH App. Pull ONLY on the tether to retrieve the ROV.
Introduction of Control
The FIFISH V6/V6s uses the patented Smart Thruster Array™ to ensure the ultimate maneuverability and delivers the 6 DOF (degree of freedom).
- V6/V6s can move in descend & ascend, left and right, forward and backward.
- V6/V6s can rotate in 360° yaw (z-axis), 360° pitch (y-axis), 360° roll (x-axis).
We have simplified the Left Joystick, Right Joystick, Left Wheel and Right Wheel into the following symbol. The arrows on RC indicate the command and the arrows on ROV indicate the actual movements. For more information, please check on FIFISH APP, Go Dive/General Settings/Second Column.
Note: 1. From the FPV (first-person view) the bright yellow is rolling clockwise and black is rolling counterclockwise, and the rolling can activate in sport or Combination mode.
Methods of Control
FIFISH V6/V6s supports 3 modes for control: A, S, and C.A is Attitude Auto mode, S is Sport mode, C is the Combination mode.
- Attitude ModeAttitude mode is designed for beginners. The ROV will not roll in Attitude mode. The ROV will stay in the same depth moving when depth holding is ON. Even with pitch angle, the depth will be the same.
- Sport ModeSport mode is designed for skillful pilots. Sport mode will enable rolling freedom, so, you will access all 6 degrees of freedom of V6/V6s. Controlling and moving based on the FPV (Frist Person View), do not operate in third-person view. The ROV will only stay in the same depth with no command input when depth holding ON.
- Combination ModeCombination mode activates the head tracking controlling via FIFISH VR Goggle, which allows the pilot to use the FIFISH VR Goggle to pitch, roll, and yaw. Combination mode delivers intuitive control and immersive experiences. Combination mode supports head tracking and remote controller working together.
- Robotic Arms for V6s ONLYThe robotic arm can be activated ONLY in Attitude mode. Use the right wheel to open and close the robotic claws.

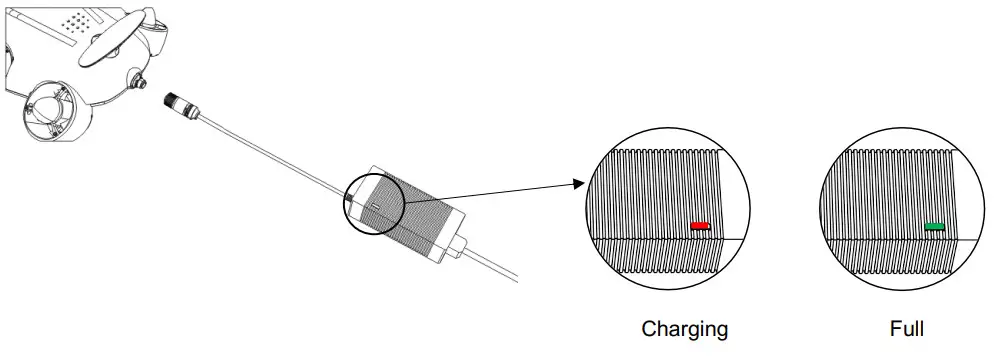
Charging
- ROV ChargingRED LED indicator illuminates while charging and green LED indicator illuminates while fully charged.
- RC Charging
 RED LED indicator illuminates while charging and green LED indicator illuminates while fully charged.
RED LED indicator illuminates while charging and green LED indicator illuminates while fully charged.Flashing POWER button, RC is charging, White steady POWER button, RC is fully charged.
Maintenance
- Soak ROV at least 1 hour after dive, then let the motors run in fresh water at least 10 minutes and rinse the ROV with fresh water. Air dry and avoid direct sunlight (for more information, please check the Maintenance Guide)
- Keep every connector (port and plug) dry and clean at all times. Put on the protective cap all the time. The salt and moisture may cause corrosion on the connector. Clean the plug with running fresh water and dry with a cotton pad or tissue paper.
- Check the propellers after every dive. Make sure NO entanglement, i.e. seaweed or fishing lines. Turn on the ROV (See the Preparation & Connection Section, page 5-12) and check the thruster and test movement and rotation.
- Clean sand regularly. Soak the ROV inside the clean fresh water at least 1 hour. Shake ROV tail down or head-down position, let sand washed out through the venting holes. Wash until the clean water drips out.
- Check the tether on regular basis, replace the tether if break or damage appears.
- Store ROV and RC in dry and cool environment (Temperature range: 5°C to 25°C or 41°F to 77°F).
- For long-term storage, keep 50% to 60% of battery level. Charge and discharge every 90 days to keep the activation of the Lithium battery.
Specifications:
ROV:
Dimension: 383 mm × 331 mm × 143 mm (15 in × 13 in × 5 5/8 in)Weight: 3.9 kg (8 5/8 lbs)Thrusters: 6 (4 × Vector + 2 × Horizontal)Maneuverability: 6 DOF (Degree of Freedom): Moving: left & right, up & down, forward & backwardRotation: 360° yaw, 360° pitch, 360° rollPosture Lock™: ± 0.1° pitch angle or ± 0.1° roll angle and moving in any directionDepth Holding: Suspending in ± 1 cmSpeed: Max 3 knots (1.5 m/s) in still waterDepth Rating: 100 m (328 ft)Operating Temp. -10 °C ~ 60 °C (14 °F ~ 140 °F)Max Dive Time: Up to 4 hoursV6 Battery: Rated Capacity 9,000 mAh / 97.2 WhV6s Battery: Rated Capacity 14,400 mAh / 155.5 Wh
Camera:
Sensor: 1/2.3” SONY CMOSEffective Pixels 12MPISO Range 100-6400 in Auto / ManualLens: Field of View 166°Aperture f/2.5Min Focusing Distance 0.4 mShutter: 5~1/5000 second Auto/Manual (Electronic Shutter Speed)Burst shooting: 1 / 3 / 5 / 7 / 10 framesWhite Balance 2500K ~ 8000K Auto / ManualExposure: – 3 EV ~ + 3 EVCompensationPhoto Resolution 4:3: 4000 x 3000Photo Format: JPEG, DNGVideo Resolution: 4K UHD: 25/30 fps1080P FHD: 25/30/50/60/100/120 fps720P HD: 25/30/50/60/100/120/200/240 fpsVideo Encode: MPEG4- AVC/H.264, HEVC/H.265Stabilization: EIS (Electronic Image Stabilization)Color System: NTSC and PALInternal Storage: 64 GB standard (128 GB is Optional)
LED Beams:Brightness: 4000 lumenCCT: 5500 K (Correlated Color Temperature)Beam Angle: 120°Dimming:3
Remote Controller:Wireless: 5 GHz Wi-Fi supportedBattery Life: Up to 4 hoursCopy &Download: Support Micro SD Card FAT32 and exFAT format (≦128GB)
Charger:V6 ROVInput: 100-240 V, 50/60 Hz ,1.3 A MAXOutput: 12.6 V ⎓ 5AV6s ROVInput: 100-240 V, 50/60 Hz ,3.0 A MAXOutput: 12.6 V ⎓ 10ARCInput: 100-240 V, 50/60 Hz ,0.5 A MAXOutput: 5 V ⎓ 3A
Tether:Length: 100m (328 ft) on SpoolBreaking Force: 80 kgf (176 lbsf)Spool:Dimension: 238 mm × 205 mm × 207 mm (9 3/8 in × 8 1/8 in × 8 1/8 in)Capability: Hold up to 100 m tether (328ft)V6s Robotic Arm:Claws Opening: 140 mm (5 ½ in)Gripping Force: 5.0 kg (11 lbs)
Disclaimer
We provide customers with after-sale services, excluding the following circumstances:
- Crashes damage caused by non-manufacturing factors, including but not limited to, pilot errors.
- Damage caused by unauthorized modification, disassembly, or shell opening not in accordance with official instructions or manuals.
- Damage caused by improper installation, incorrect use, or operation not in accordance with official instructions or manuals.
- Damage caused by a non-authorized service provider.
- Damage caused by unauthorized modification of circuits and mismatch or misuse of the battery and charger.
- Damage caused by dives that do not follow instructions and manual recommendations.
- Damage caused by operation in bad water conditions (i.e. strong currents, huge waves, etc.)
- Damage caused by operating the product in an environment with electromagnetic interference (i.e. in mining areas or close to radio transmission towers, high-voltage wires, substations, etc.).
- Damage caused by operating the product in an environment suffering from interference from other wireless devices (i.e. transmitter, video-downlink, Wi-Fi signals, etc.).
- Damage is caused by a forced dive when components have aged or been damaged.
- Damage caused by reliability or compatibility issues when using unauthorized third-party parts.
- Damage caused by operating the unit with a low-charged or defective battery.
- Uninterrupted or error-free operation of a product.
- Loss of, or damage to, your data by a product.
- Any software programs, whether provided with the product or installed subsequently.
- Failure of, or damage caused by, any third-party products, including those that QYSEA may provide or integrate into the QYSEA product at your request.
- Damage resulting from any non-QYSEA technical or other support, such as assistance with “how-to” questions or inaccurate product set-up, installation, and firmware upgrade.
- Damage caused by operating the ROV in the sensitive zone (military, natural resource protection zoning, marine conservation and ocean conservation, etc.)
- Damage caused by unpredictable factors (current, cave collapse, swallow by an animal, etc.)
- Products or parts with an altered identification label or from which the identification label has been removed.
- The presence of water droplets or water stains on the ROV may be due to the running tests in water performed at our factory. This will not affect the features and function of the FIFISH underwater robot.
For more information, please check our website for tuition videos, or read FAQ in FIFISH APP/help/FAQ. https://www.qysea.com/fifishv6This content is subject to change without prior notice.
1. Motors Maintenance (After Every Dive)
- Connect the remote controller to V6/V6s, and open the FIFISH App (see Hardware connection section, in Quick Start Guide).
- Make sure every motor is immersed inside freshwater, see the picture (vertical soaking in the bucket will have the same results).
- Open FIFISH App, homepage, Click “Help” on the bottom right corner. Click “Maintain”, and then “Cleaning Program” will start. All motors will rotate slowly.
- In about 10 mins the Cleaning Program will stop. Air dry V6/V6s in a cool place and avoid direct sunlight.
2. Battery Maintenance
- Keep 50% to 60% battery level before long-term storage.
- Charge to full once every 90 days.
3. Robotic Arms
- Rinse with fresh water after every dive.
- Keep connector (port and plug) dry and clean at all times.
 report this ad
report this ad
Maintenance Guide
In order to have your V6/V6s in a good condition at all time, soak and clean your V6/V6s with clean fresh water after every dive. The cleaning process in FIFISH App will instruct you to get rid of the salt residues and salt crystallization inside the motors, as well as, clean the chlorine from pool water. The standard maintaining steps are listed on page 22,
References
[xyz-ips snippet=”download-snippet”]