SkyWalker FPV Balance Apparatus Flight ControllerProduct Manual V3.6
Dimension: 40mm 25mm 5mmWeight: 4gVoltage: 5VCurrent: 20maWorking temperature: -15 ℃ -65 ℃Gyroscope sensitivity: 2000sec/sAppliacable servo: 1.52ms simulate servo, 1 52ms digital servoRemote control compatibility: PPM,PCM,2.4G
Features
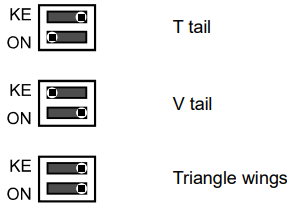
- Support wings: Normal wing(T tail), V tail, Triangle wings.
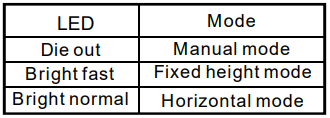
- Flying mode: Manual mode, Horizontal mode, Fixed height mode.
- Unique barometer fixed height mode, easy operation, safe flying, special recommendation for beginner.
- Adopted 32 bit processor, high precision barometer, 6 axis sensor.
Assembling help
- Model settingThe factory default model is triangle wing tail type. The transmitter sets as fixed wing mode. There is no need to set mix control. Move the joystick as figure below.

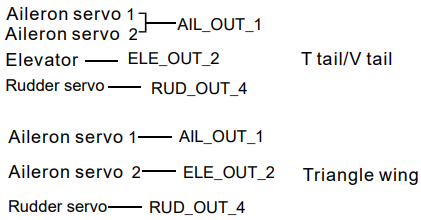
- Servo connectionAny model servo’s signal wire connects “ THR OUT 3 channel.The V tail and triangle wing flight controller can operate automatically without setting by transmitter.
- Transimitter connectionPrepare for PMW receiver with at least 5 channels and corresponding transmitter. The transmitter should set fixed wing mode.The connection between transmitter and flight controller are as belows.*No matter what model you choose, the 5 channels should be connected. Otherwise, the flight controller can not pass test automatically after power on.
- Flight controller installation*The flight controller should place into fuselage horizontally. As figure above, it should right across aircraft’s head.
 The V tail and triangle wing flight controller can operate automatically without setting by transmitter.
The V tail and triangle wing flight controller can operate automatically without setting by transmitter.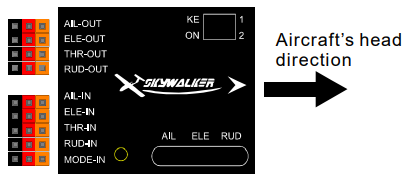 *The flight controller should place into fuselage horizontally. As figure above, it should right across aircraft’s head.
*The flight controller should place into fuselage horizontally. As figure above, it should right across aircraft’s head.Flying mode
- Fixed height mode—best for beginner and FPV hobbyist.① The lowest height keep in 35m under this mode.② The aircraft can lift up and climb steeply into the sky under this mode.It is beneficial to casting by one hand.③ Under this mode, the aircraft maintains a minimum of 45% throttle, the flight controller can semicontrol throttle to decrease possibility of aircraft stall.*Pitching joystick returns to the middle, after 1.5s, it enters into fixed height mode.*Push up throttle joystick to increase its power.
- Manual modeThe flight controller can output joystick’s amount of rudder. No control function is given.
- Horizontal modeThe aircraft can turnover freely. The aircraft will fly horizontally when rocker returns to middle.
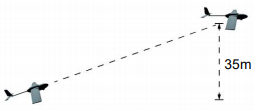 ① The lowest height keep in 35m under this mode.② The aircraft can lift up and climb steeply into the sky under this mode.It is beneficial to casting by one hand.③ Under this mode, the aircraft maintains a minimum of 45% throttle, the flight controller can semicontrol throttle to decrease possibility of aircraft stall.*Pitching joystick returns to the middle, after 1.5s, it enters into fixed height mode.*Push up throttle joystick to increase its power.
① The lowest height keep in 35m under this mode.② The aircraft can lift up and climb steeply into the sky under this mode.It is beneficial to casting by one hand.③ Under this mode, the aircraft maintains a minimum of 45% throttle, the flight controller can semicontrol throttle to decrease possibility of aircraft stall.*Pitching joystick returns to the middle, after 1.5s, it enters into fixed height mode.*Push up throttle joystick to increase its power.Transmitter and servo setting
- Power onTake off propeller if you use at first time.The aircraft should stand still until it finishes the preliminary process. It takes 8s that you will hear motor’s start-up sound.
- Transmitter calibrationPush THR(throttle) toward the lowest position, the other channels are in the middle position. Then change over FlightMode switch for six times to ensure its central point calibration.Do not adjust joystick deviation after transmitter calibration. The flight controller will help it keep balance.*The ailerons will swing twice to remind calibration correct after calibration of transmitter.*It needs to calibrate after changing transmitter or joystick deviation.
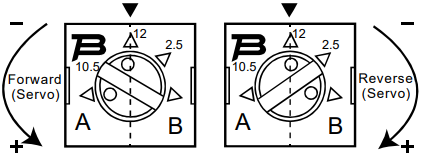
- Sensitivity knobThere are three fine-tune, respectively adjust the sensitivity of AIL, ELE and RUD as well as servo’s direction.The greater sensitiveness is, the stronger resistance is. At same time, the knob can adjust the direction of servo in all channels. The knob is divided into two side(A/B side) that taking reference to the middle direction of 12 o’clock.
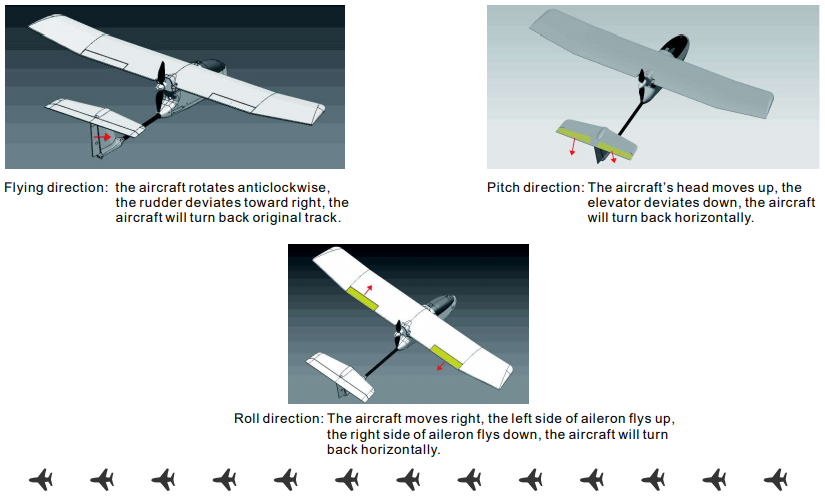
- Servo direction settingStep 1: Change the flying mode over horizontal mode to make sure that the knob has adjust A side to B side.Step 2: Swing the aileron, flap, flying direction to observe rudder’s respond (for reference 6. Rudder respond reference ). Twist to the other side if there is no respond.
- Transmitter direction settingStep 1: Change the flying mode over horizontal mode.Step 2: Adjust joystick to the position of roll direction, pitch and direction to ensure the servo’s respond is right. Otherwise, please set the channel phase of transmitter.Step 3: Adjust rudder mechanically to make it is in good position.
- Rudder respond referenceTurn the joystick to the lowest position to adjust sensitivity in order to prevent from fault judgement because of flight controller’s accumulated effect.
QAC:
Q1: Why does it dive violently in the horizontal mode to throw aircraft?
A1: The flight controller detects that the aircraft keeps on forward and overlays output violent div e instruction. It is late to respond when moving the elevator joystick at the moment of throwing aircraft.
Q2: Why does it climb to fly in the fixed height mode to throw aircraft?
A2: The flight controller needs some time to enter into the fixed height mode in order to keep stable air pressure.Recommended that throwing the aircrafts for about 2s before pushing the accelerator.
Q3: What impact will the greater or lower sensitivity have on aircraft?
A3: The greater sensitivity is, the faster respond and the stronger resistance the aircraft is. It may lead to shock of aircraft if the sensitivity is too strong. Otherwise, the lower respond and the stronger resistance the aircraft is. It may lead to weak stability if the sensitivity is too slow. In general, the triangle wings aircraft flies faster, so adjust the sensitivity smaller. Please take reference to manual.
Q4: Do you need to recalibrate transmitter after changing transmitter’s offset?
A4: Yes. After adjust joystick’s offset, it needs to ensure the flight controller in neutral point. Take reference to transmitter calibration
SkyWalker FPV Balance Apparatus Flight Controller User Manual – SkyWalker FPV Balance Apparatus Flight Controller User Manual –
[xyz-ips snippet=”download-snippet”]