
X BOSS Ac2000 Dual-Core Tri-Mode Rssi Receiver

- Ingenuity hardware dual-core framework, two CC2500+LNA wireless system connect two antennas. Compare other recivers that switch antennas depend on signal strength, AC2000 two antennas can keep receive full-time, greatly enhance the response speed and reliability in execrable wireless environment.
- Support S-FHSS(8 CHs)、D16 non-EU(14 CHs)、D16 EU-LBT(14 CHs) three modes, output S.BUS signal.
- The channel 16 of S.BUS value is real-time RSSI, BETAFLIGHT OSD can display this RSSI value in screen.
- Rated voltage 4.0V~6.0V, size 14mm x 26mm, weight 1.8g, perfect fit high reliability medium and small size drone.
STATUS LED : LED of AC2000 blink twice then solid when power on, the LED meaning as fowllow.
| First blink | Second blink | Then LED solid |
| ■ S-FHSS |
■ reserves |
■ no signal |
| ■ D16 non-EU | ■ receive backup signal (brightness meaning signal strength) | |
| ■ D16 EU-LBT | ■ receive preferred signal (brightness meaning signal strength) |
BIND : First blink after power on indicate the receive mode, ■S-FHSS, ■D16 non-EU, ■D16 EU-LBT.
| S-FHSS BIND | D16 non-EU and EU-LBT BIND |
| Turn on the TX, then power on AC2000 while pressing the key, GREEN LED fast blink meaning bind mode, user can release the key. Bind procedure is completed and the
receiver working normally when GREEN LED solid. |
Power off the TX, Power on AC2000 while pressing the key, GREEN LED fast blink meaning bind mode. Set TX into D16 bind mode, RED LED solid meaning bind success. TX exit
bind mode, GREEN LED solid meaning working normally. |
RECEIVE MODE SWITCH: When AC2000 RED or GREEN LED solid, Press the key and hold LED will go off, after 3 seconds
YELLOW LED will turn on, release the key AC2000 will switch to another receive mode and restart automatic.
FAILSAFE: Please set failsafe in your radio, depend on the radio S-FHSS, D16 non-EU and D16 EU-LBT shoWuld have at least 2 failsafe settings as follow (different radio may name the setting differently):
- HOLD, BUS sent the value when received last time, we suggest switch channel use this setting.
- CUSTOM, this setting can custom S.BUS sent value when no signal
In most cases, user can set AIL, ELE, YAW middle (CUSTOM 1500), THR low (CUSTOM less than 950), other switch channels use HOLD. In most cases please make sure [ARM] / [DISARM] channel failsafe setting HOLD in [ARM] value. Because if failsafe setting use [DISARM] value when briefly lost signal, the drone will switch in [DISARM] state, once the signal from radio received the drone maybe can’t switch to [ARM] state because THR high (more than 1000), this will result crash when briefly lost signal. So [ARM] / [DISARM] channel failsafe setting should HOLD in [ARM] value or use CUSTOM in [ARM] value, if signal lost a long time because THR low (less than 950), drone will just crash, not fly away.
Before first flight, we suggest remove propeller then [ARM] the drone, push THR middle make motor rotating, power off the radio to simulate lost signal, motor should STOP or IDLE rotating, correct failsafe setting is when power on the radio drone should can control immediately not need do [ARM] / [DISARM].
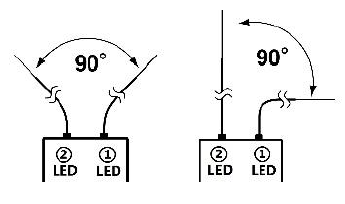
| AC2000 have 2 LEDs correspond to the 2 wireless systems, we call them W1 and W2 for short. By default, receiver read W1 first, so when signal good W1’s LED should BLUE (preferred signal), W2’s LED should GREEN (backup signal),
Receiver will use W2 when W1 lost signal, W2’s LED will BLUE at this time. |
Two antennas should be placed at 90 degrees to each other. |
| Suggest distance test befor use, when close to THE FURTHEST DISTANCE:
<a> . Hold W1 antenna, W2’s BLUE LED should turn on.
<b> . Release W1 antenna, hold W2 antenna, W1’s BLUE LED should on. |
|
| If hold antenna can not cause BLUE LED switch when closed to THE FURTHEST DISTANCE,maybe another antenna place unreasonable cause signal bad.
(NOTICE: when signal good, hold antenna will not cause BLUE LED switch) |
![]()
[xyz-ips snippet=”download-snippet”]